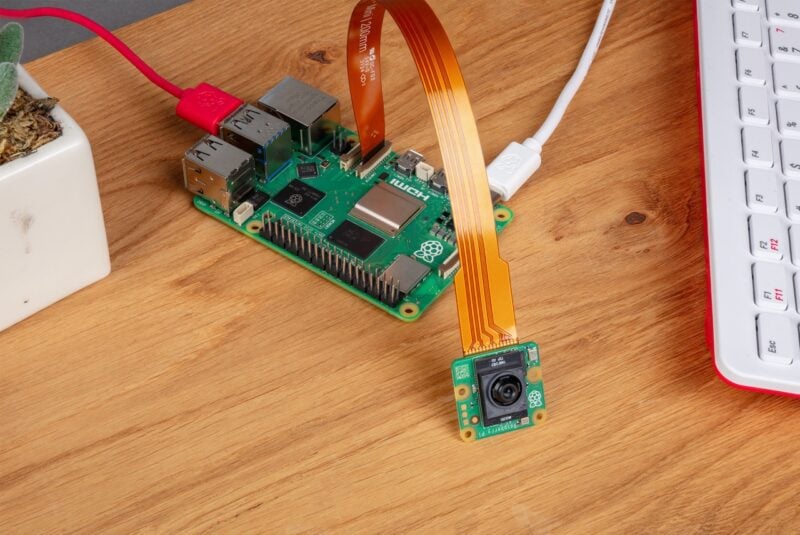
如果您已經擁有我們幾週前推出的 Raspberry Pi AI 相機,您可能需要一些幫助來啟動和運行它 -- 它與我們的其他相機產品略有不同。我們查閱了文件並為您帶來了此入門指南,如果您按照這些步驟操作,您的相機將可以執行物體檢測和姿勢辨識,即使這一切對您來說都是新鮮事。然後,您可以深入了解我們的其餘 AI 相機文檔,以了解更多資訊。
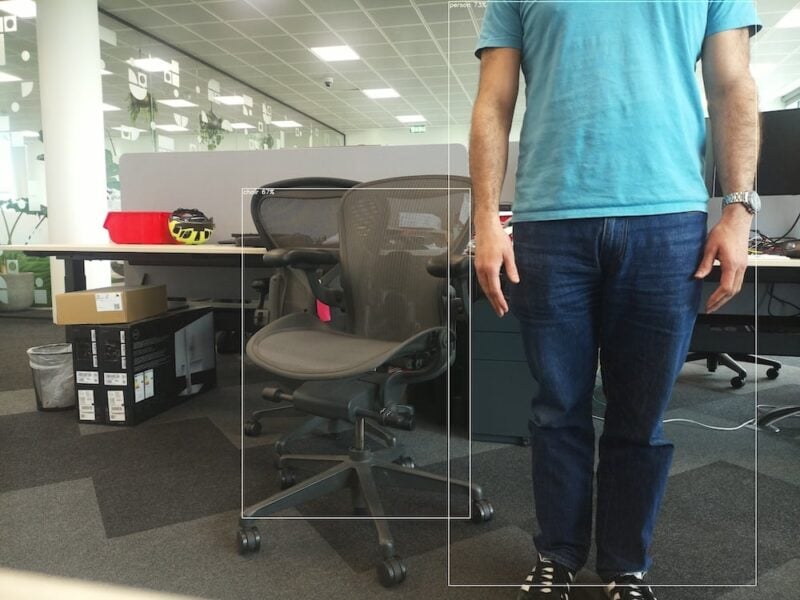
這裡我們介紹如何在 Raspberry Pi AI 相機上執行預先安裝好的 MobileNet SSD(物件偵測)和 PoseNet(姿勢辨識)神經網絡模組。
事前準備
我們假設您正在使用連接到 Raspberry Pi 4 或 Raspberry Pi 5 的 AI 相機。
首先,確保您的 Raspberry Pi 運行最新的軟體。執行以下命令進行更新:
AI 相機整合 RP2040 晶片,負責將神經網絡模組上傳到相機,我們發布了新的 RP2040 晶片,大大提高了上傳速度。從現在開始發貨的 AI 相機均已進行此更新,如果您有早期設備,您可以按照此論壇中的韌體更新說明自行更新。這應該不會超過一兩分鐘,但在開始之前請注意,至關重要的是不要讓任何事情中斷過程,例如:如果相機斷開連接,或者您的 Raspberry Pi 斷電,如果發生這種情況相機將無法使用,您需要將其退回給經銷商進行更換。安裝了早期韌體的相機功能齊全,除模組上傳速度外,其性能各方面均相同。
安裝 IMX500 韌體
除了需要更新 RP2040 晶片韌體外,AI 相機還必須在啟動時將運行韌體下載到 IMX500 感測器上。若要將這些韌體檔案安裝到您的 Raspberry Pi 上,請執行以下命令:
一旦所有系統套件都更新完畢且韌體檔案安裝完畢,我們就可以開始運行一些範例應用程式。如前所述,Raspberry Pi AI 相機與 libcamera、rpicam-apps 和完全整合 Picamera2。這篇部落格文章重點介紹了 rpicam-apps,但您可以在我們的 AI 相機文件中找到更多內容。