9. 案例03——磁控狗
9.1 目的
透過磁力控制 XGO 運動的程序。
9.2 所需材料
micro:bit XGO 機器人套件x19.3 硬件連接
將 micro:bit 與計算機連接。 9.4 軟體平台
9.4 軟體平台
軟體平台 9.5 程式
9.5 程式
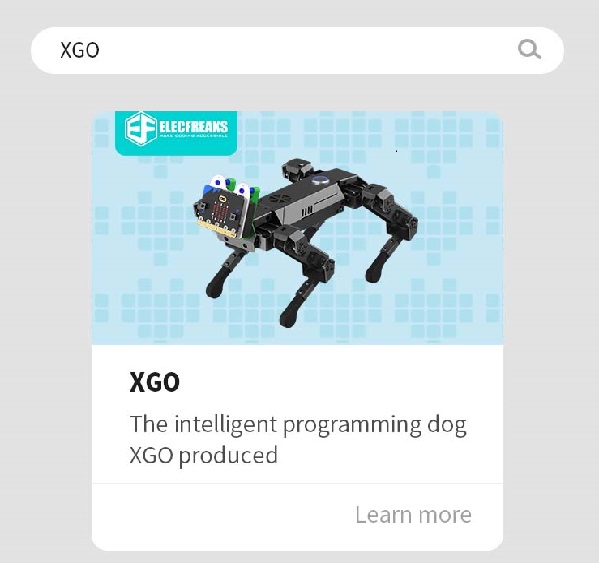
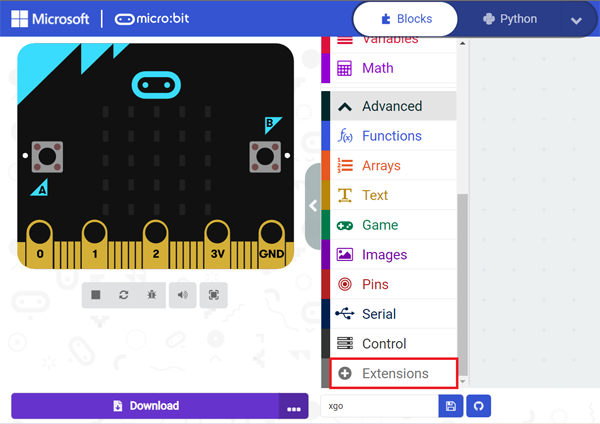
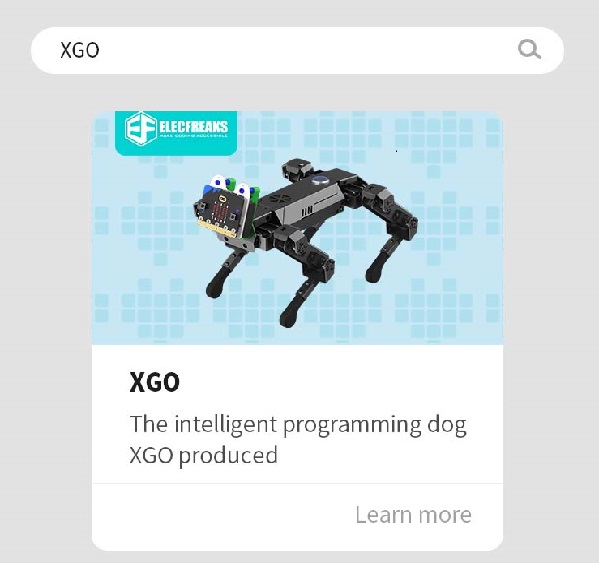
添加 XGO 擴展。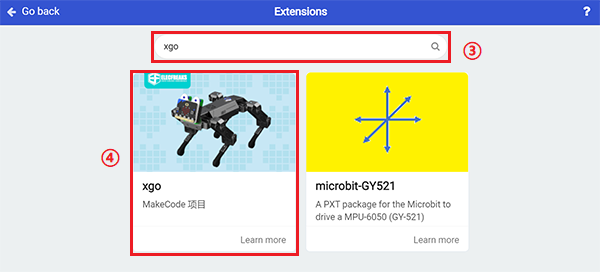
 9.6 程式內容
9.6 程式內容
Code 鏈接:磁控狗
鏈接:磁控狗
也可以直接在下面下載: 9.7 常見問題
如果 XGO 不動,請嘗試更換新的電磁鐵。
10. 案例04——聲控狗
10.1 目的
透過音量大小控制 XGO 運動的程序。
10.2 所需材料
micro:bit XGO 機器人套件x110.3 硬件連接
將 micro:bit 與計算機連接。 10.4 軟體平台
10.4 軟體平台
軟體平台 10.5 程式
10.5 程式
添加 XGO 擴展。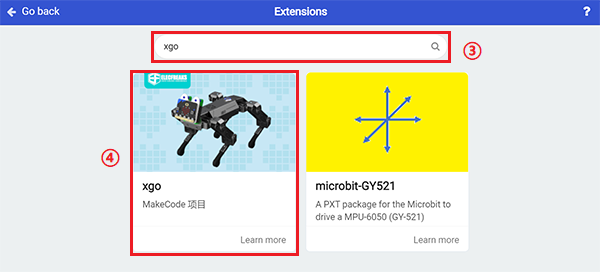
 10.6 程式內容
10.6 程式內容
Code 鏈接:聲控狗
鏈接:聲控狗
也可以直接在下面下載: 10.7 常見問題
如果 XGO 不動,請嘗試提高音量。
11. 案例05——觸控狗
11.1 目的
觸碰micro:bit LOGO控制 XGO 運動的程序。
11.2 所需材料
micro:bit XGO 機器人套件x111.3 硬件連接
將 micro:bit 與計算機連接。 11.4 軟體平台
11.4 軟體平台
軟體平台 11.5 程式
11.5 程式
添加 XGO 擴展。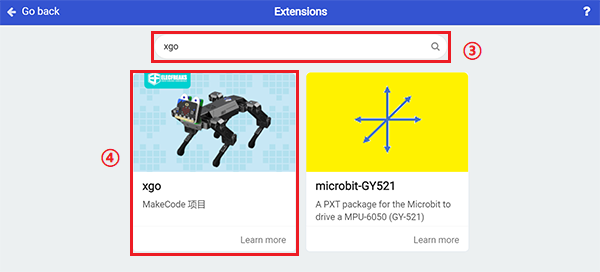
.png)
.png) 11.6 程式內容
11.6 程式內容
Code 鏈接:觸控狗也可以直接在下面下載:
鏈接:觸控狗也可以直接在下面下載:
12. 案例06——使用Joystick:bit控制XGO12.1 目的
利用micro:bit廣播遙控 XGO 運動的程序。
12.2 所需材料
micro:bit XGO 機器人套件x112.3 硬件連接
將 micro:bit 與計算機連接。 12.4 軟體平台
12.4 軟體平台
軟體平台 12.5 程式
12.5 程式
添加 XGO 擴展。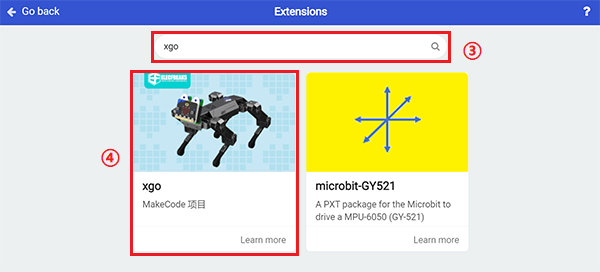
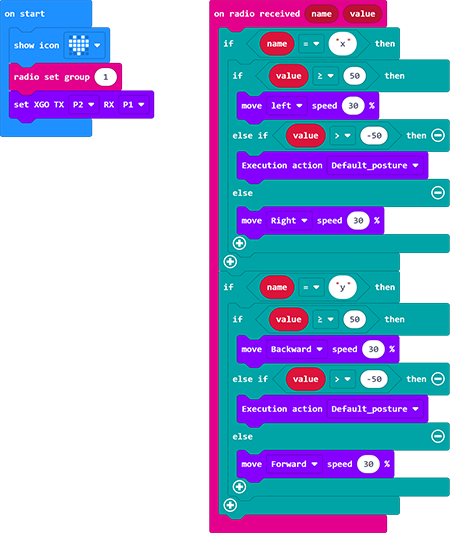
 12.6 程式內容
12.6 程式內容
Code遙控桿程式 XGO程式
XGO程式 鏈接:遙控桿程式也可以直接在下面下載:鏈接:XGO程序
鏈接:遙控桿程式也可以直接在下面下載:鏈接:XGO程序
或者你可以直接下載: 12.7 常見問題
如果 XGO 不行走,請檢查 XGO 和 Joystick:bit 的電源狀態。
案例07 — 使用 APP 遠端控制 XGO 目的
目的
本案例中,我們要讓 XGO 可以快速前進。
所需材料- 1x micro:bit XGO 機器人套件
- 1x 智慧手機
硬體連接
步驟一、下載 XGO APP
- 安卓用戶請在 Google Play 中搜尋「XGO」;IOS用戶請在 IOS 應用商店中搜尋「XGO」,下載後打開,會看到下面的介面:
 步驟二、連接 XGO
步驟二、連接 XGO- 點擊 app 介面左上角的藍芽圖標(圖1),介面如圖2
步驟三
- 按照提示搖一搖手機,藍芽會自動連接(注意:請先打開 XGO,手機藍芽和位置,如果連接不上,請檢查手機設定是否有授權使用此類功能)。
控制模式
XGO 有四種控制模式,包括示範模式、全能模式、單腿控制、伺服控制。
- 全能模式:能夠以高自由度和靈敏的操作來控制速度和方向。
- 單腿控制&伺服控制:可以控制更小的單腿粒度(左前腿、右前腿、右後腿、左後腿),以及單腿上下舵的調整。常用於對特定動作進行微調。
操控示範該項目在全能模式下使用 XGO App 使 XGO 前進/後退/右轉/左轉,您可以在此處參考示範影片。
案例08 — 顫抖的 XGO 目的
目的
之前的範例中已知道如何操作 XGO,在此項目中將嘗試對 XGO 進行編程,讓它能像真正的寵物狗一樣做出反應。狗狗覺得冷的時候會發抖,讓我們嘗試製作一隻會發抖的 XGO 吧!
所需材料硬體連接 程式設計
程式設計
步驟一
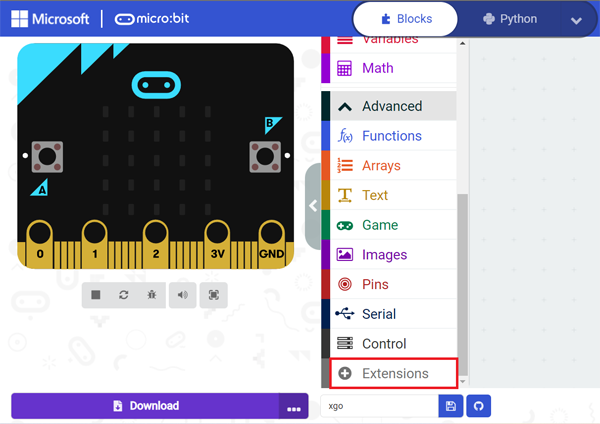
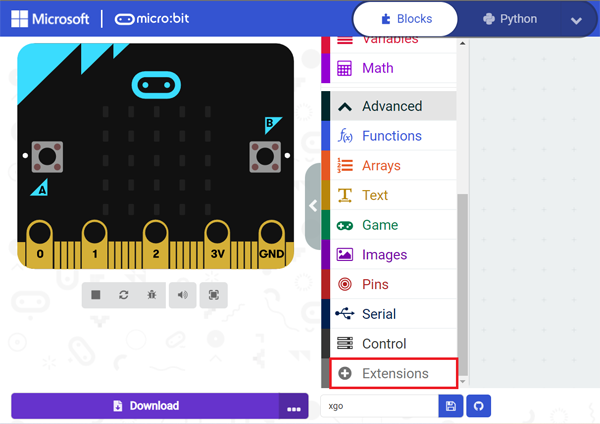
- 點選 MakeCode 中的「Advanced」,找到「Extensions」
 步驟二
步驟二 注意:如果遇到編碼庫不相容的提示,可繼續依照指示操作或建立新專案。示範編碼
注意:如果遇到編碼庫不相容的提示,可繼續依照指示操作或建立新專案。示範編碼
項目展示
程序中溫度值的設定取決於當前所處的環境溫度。如果沒有加熱設備,可考慮將手掌放在 micro:bit 上。一兩分鐘後,micro:bit 的溫度會升高1-2度。
案例09 — 感測 XGO 的心情 目的
目的
當我們和寵物狗一起玩的時候,有可能知道它是快樂或悲傷嗎? 讓我們發揮想像力完成這項目標吧!
所需材料
- 1x micro:bit XGO 機器人套件
- 1x micro:bit
工作原理
- 我們將在 micro:bit 上使用加速度計,加速度計感測器是一種測量運動的運動感測器。編程使 XGO 上的 micro:bit 獲得加速度計 3 個維度(x、y 和 z 軸)的恆定力讀數,並通過無線電發送它們。
- 將另一個 micro:bit 連接到計算機並編寫程序以從收音機接收數據。連接到PC 的 micro:bit 接受 XGO 上 micro:bit 發送的數據,並將數據作為串口數據發送到您的PC。
- 您現在應該會在 micro:bit 模擬器下方看到一個「Show Console Device」按鈕,點擊它您應該會在螢幕上看到實時數據讀數的圖形表示。
- 為 XGO 設置不同的速度和方向,並觀察每個軸上的讀數如何變化。按暫停鍵將數值數據下載為 CSV(逗號分隔值)文件,然後您可以在電子表格中打開進行分析。如果刪除第二個和第三個時間列並僅保留第一個時間列,則可以將數據繪製在電子表格散點圖上以顯示力隨時間的變化。
硬體連接
使用 USB 線連接電腦和 micro:bit。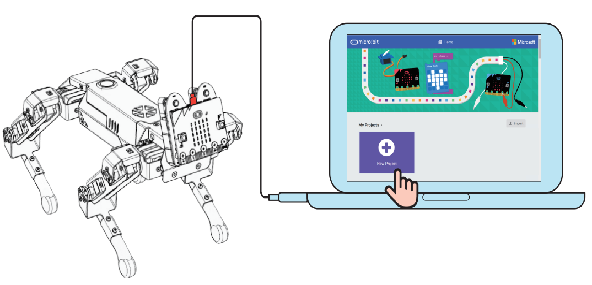
程式設計
步驟一
- 點選 MakeCode 中的「Advanced」,找到「Extensions」
 步驟二
步驟二 注意:如果遇到編碼庫不相容的提示,可繼續依照指示操作或建立新專案。示範編碼-發送端
注意:如果遇到編碼庫不相容的提示,可繼續依照指示操作或建立新專案。示範編碼-發送端
示範編碼-接收端
注意:「value」值表示 XGO 的三維加速度向量模組,不需要填寫。該值表示 XGO 在某個方向上運行的速度。
項目展示
案例10 — XGO 吃骨頭
目的
狗狗非常喜歡骨頭,可以使用編程來模擬。
所需材料
- 1x micro:bit XGO 機器人套件
- 1x micro:bit
工作原理
- 此項目需要兩個 micro:bit,我們將創建一套程序,一個用於無線電發射器;另一個用於接收信號。
- 接收端距離發射端越近,無線電信號越強。如果信號強,則意味著另一個 micro:bit 可能離得很近;如果無線電信號微弱,另一個 micro:bit 可能離得很遠。
硬體連接
 程式設計
程式設計
步驟一
- 點選 MakeCode 中的「Advanced」,找到「Extensions」
步驟二
項目展示
案例11 — 絕對方位不迷路 XGO
 目的
目的
當你迷路時,XGO 可指引我們正確的道路。
所需材料
工作原理
- micro:bit 有一個羅盤感測器,用於偵測磁場,可做為指南針使用。
- 首次使用 micro:bit 指南針時,必須進行校正。螢幕上會出現一個小遊戲,您必須傾斜 micro:bit 點亮每個 LED,接著就可正常使用了。
硬體連接使用 USB 線連接電腦與 micro:bit。
程式設計
步驟一
- 點選 MakeCode 中的「Advanced」,找到「Extensions」
 步驟二
步驟二
項目展示
案例12 — 尋寶大師 XGO
目的
大家都知道狗狗的嗅覺非常靈敏。如果有東西遺失的時候,是否能讓 XGO 替我們找回寶物呢?
所需材料
工作原理
- micro:bit 有一個稱為磁力計的羅盤感測器,用於偵測磁場,可感測地球的磁場,做為指南針使用。
- 首次使用 micro:bit 指南針時,必須先進行校準。螢幕上會出現一個小遊戲,必須傾斜 micro:bit 點亮每個 LED,接著就可以正常使用了。
硬體連接
程式設計
步驟一
- 點選 MakeCode 中的「Advanced」,找到「Extensions」
 步驟二
步驟二
項目展示
相關問題
由於不同磁鐵的磁力強度不同,本案例使用的磁性數據大小僅供參考,請根據拿到的磁鐵適當調整數據。

























{kind=link}