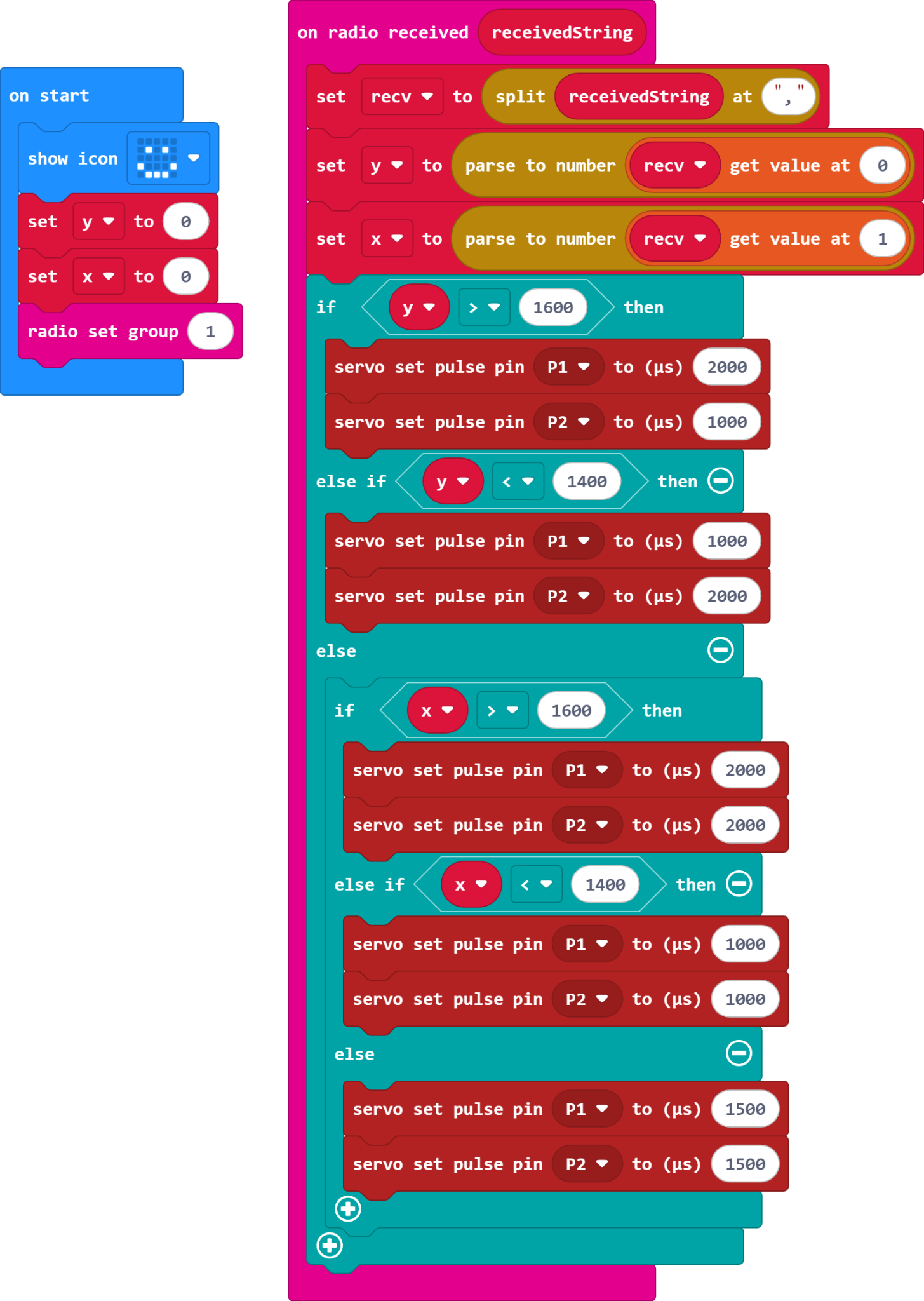







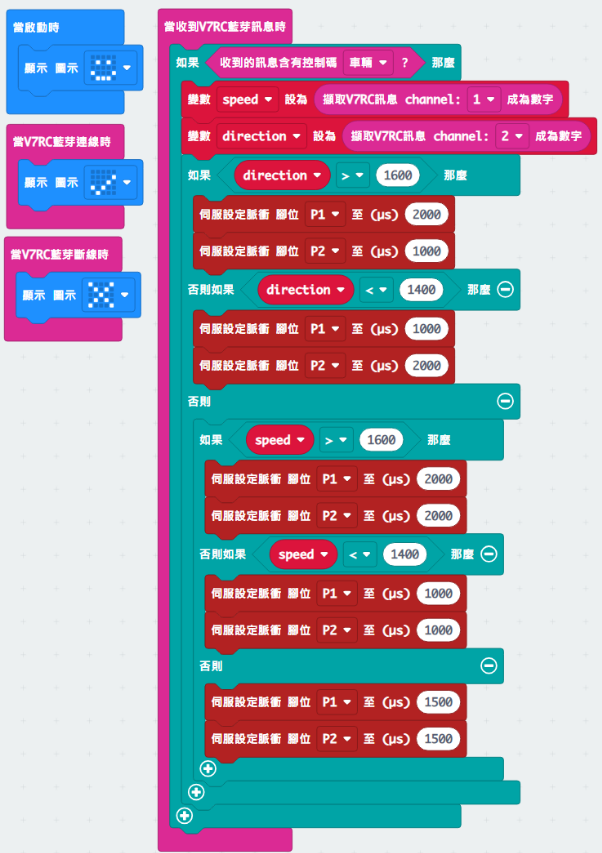


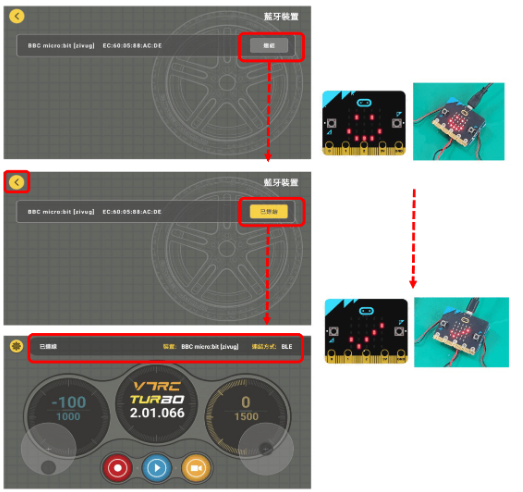



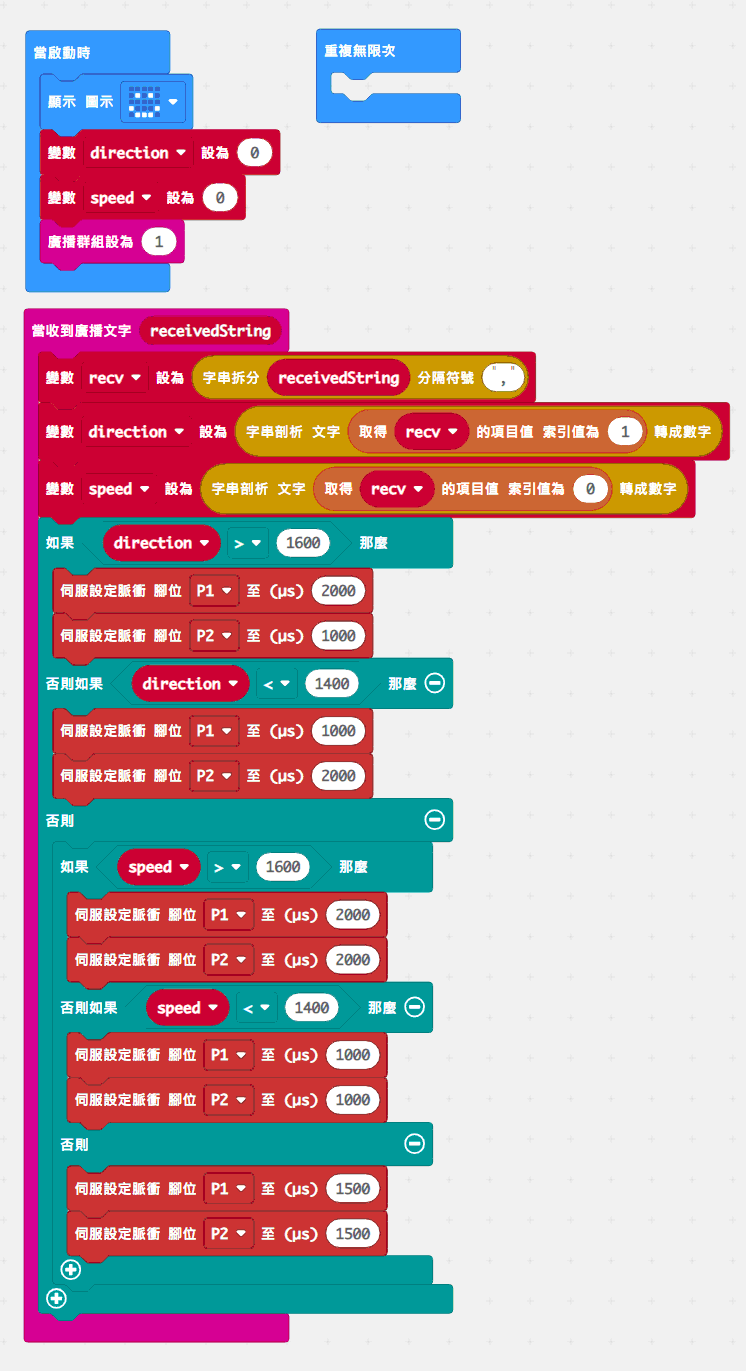
若使用者想要以KSB045搖桿操作MicroBall 球型機器人,也非常容易。首先必須改寫MicroBall 球型機器人內部程式,改以micro:bit內建的廣播功能,接收控制訊號,完整的MicroBall 球型機器人接收端程式如下:(可直接以此鍊結下載 https://reurl.cc/bY7n4E)。
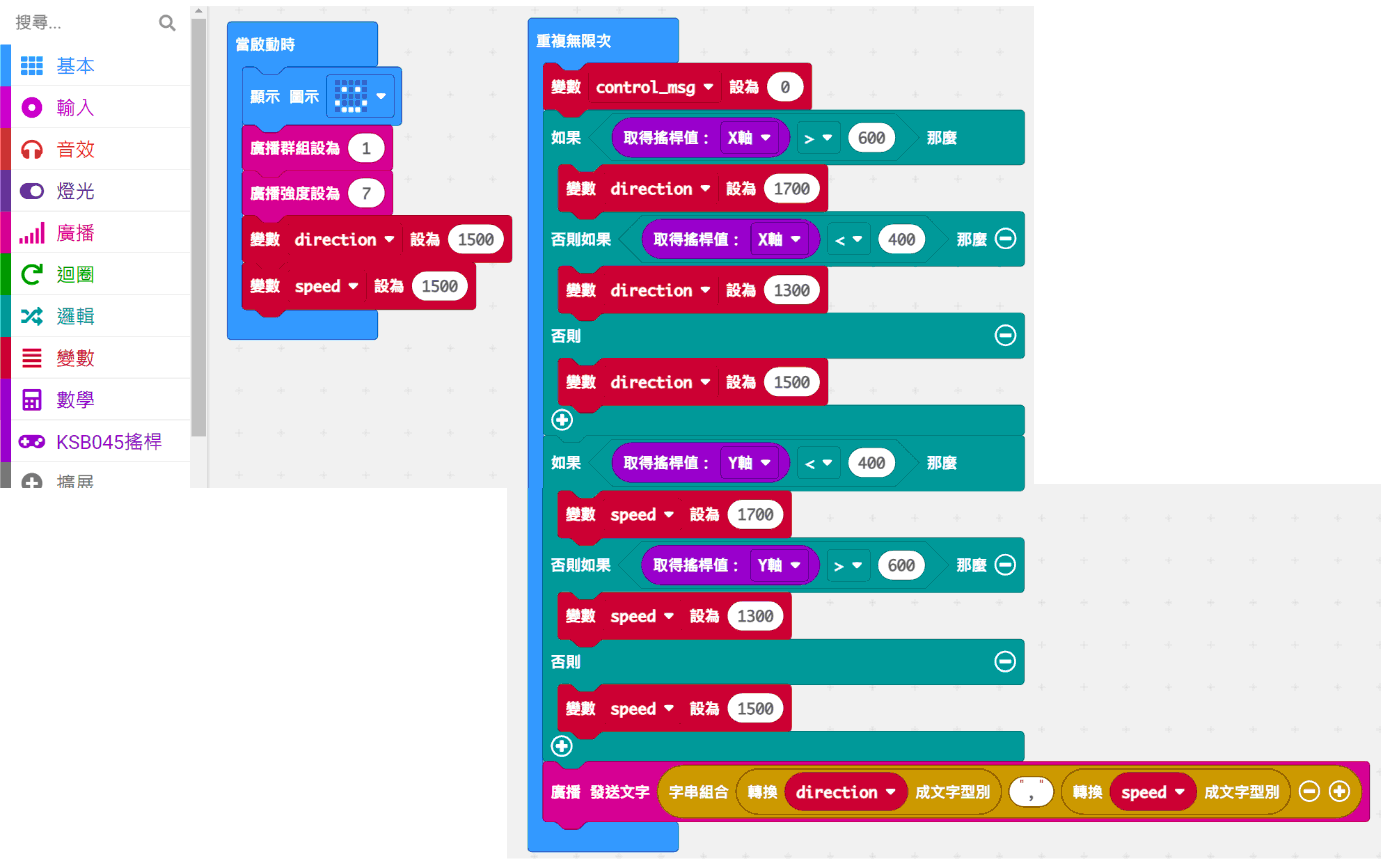
同時,在KSB045搖桿上也需安裝一片用於發射控制訊號的 micro:bit,在撰寫搖桿端的控制程式時,建議以入劉正吉老師所設計的 KSB045專用積木,可大幅提昇程式撰寫速度,吉哥KSB045積木的說明網址如下:https://reurl.cc/93V5Nv,若要安裝此擴展,可以透過makecode中的『擴展』->『搜尋』功能,輸入該積木的網址: https://github.com/lioujj/pxt-KSB045,即可成功安裝。
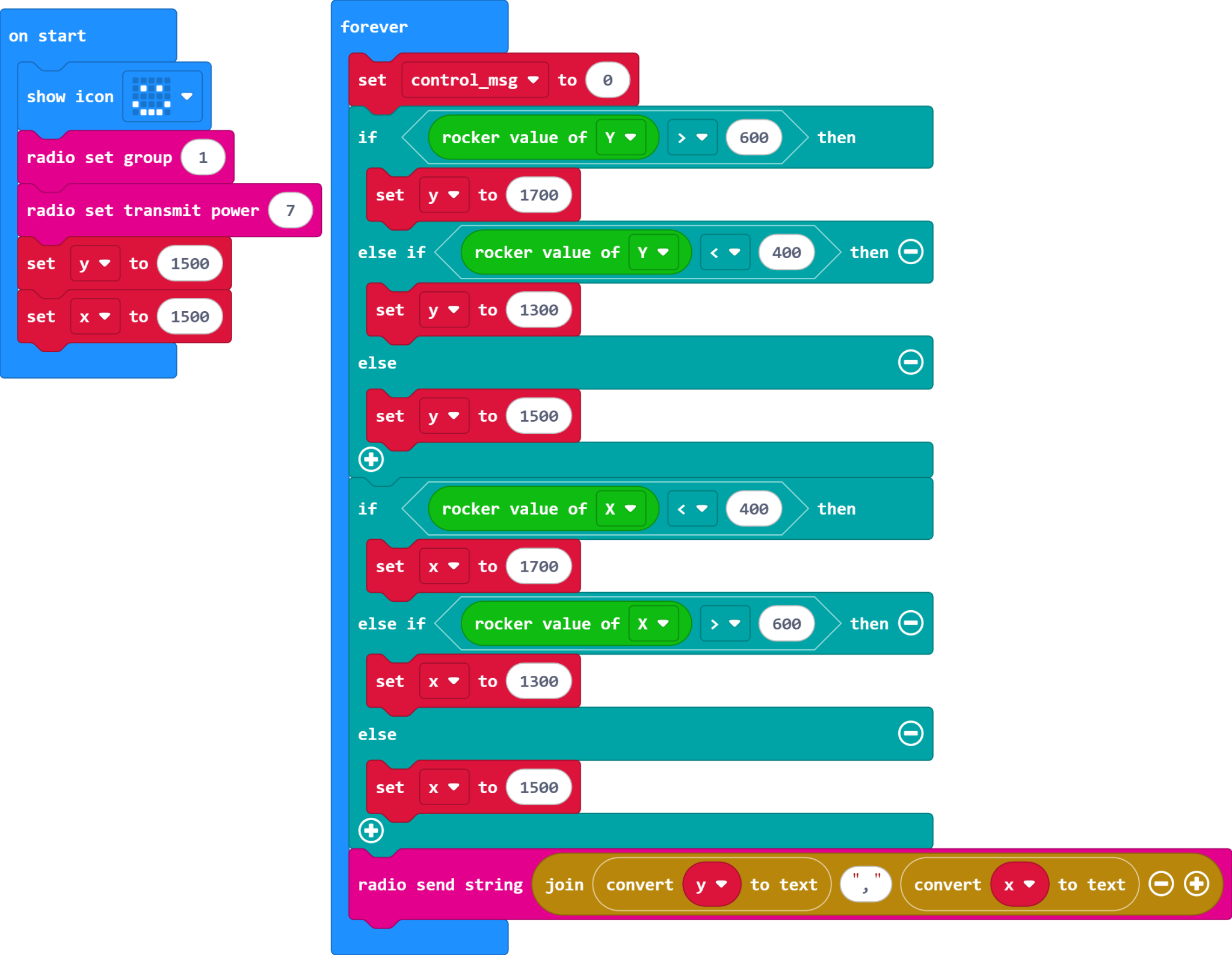
完整搖桿端程式如下:https://reurl.cc/93V5Yv
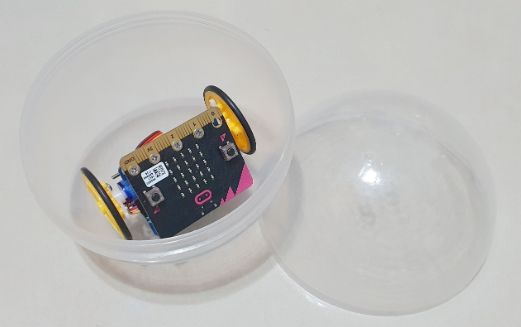
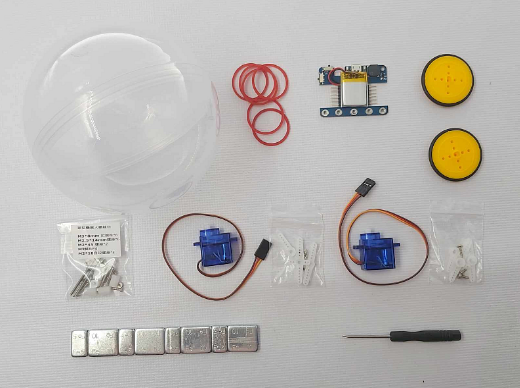
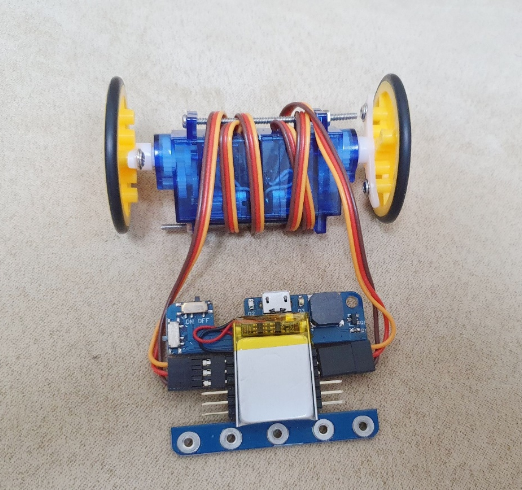
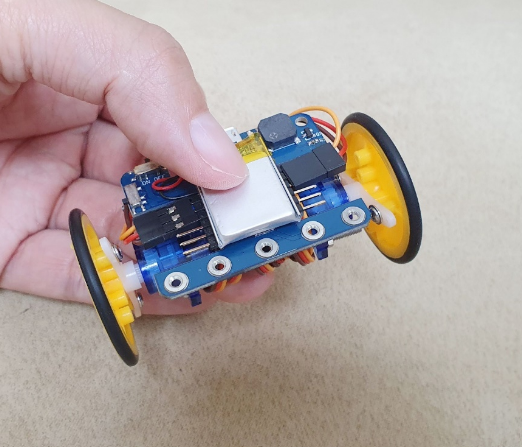
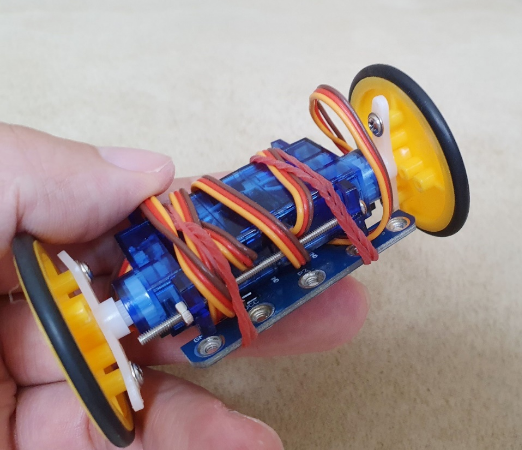
※KSR045 MicroBall 球型機器人也可以使用Joystick來操控球型機器人唷!
Joystick搖桿-傳送端
Joystick搖桿-接收端
 |  |  |  |  |